
Description
Si vous pensez qu’un engrenage se résume à un pignon qui tourne.
Ces deux tomes vont sérieusement compliquer votre vision des choses.
Sommaire
Maîtrisez la conception des engrenages cylindriques et hélicoïdaux
D’abord, ce manuel technique expose les calculs fondamentaux des dentures droites et hélicoïdales. En effet, il détaille les profils conjugués et les surfaces développables. De plus, des formules précises déterminent les poussées axiales, radiales et tangentielles. Enfin, les constructeurs taillent les roues par génération avec les outils Fellow, Maag ou vis-fraise.
Étudiez les engrenages coniques et hyperboliques en détail
Pour cela, vous analysez les engrenages coniques à denture droite, hélicoïdale ou spirale. Ainsi, la roue plate constitue la référence absolue pour générer les dentures. Par ailleurs, les engrenages gauches transmettent la puissance entre des axes non concourants. Justement, des applications numériques complètes traitent le couple de la roue et de la vis sans fin.
Choisissez les matériaux et dimensionnez les éléments de roues
Notamment, vous sélectionnez la fonte ou les aciers moulés selon les contraintes réelles. De même, le bronze phosphoreux demeure le matériau privilégié pour fabriquer les vis sans fin. Ensuite, vous proportionnez la jante, le moyeu et les liaisons jante-moyeu avec précision. C’est pourquoi vous fixez solidement les roues sur leurs arbres par clavetage ou cannelures.
Concevez des réducteurs de vitesse et des boîtes de vitesses
Désormais, vous déterminez le rapport global et le nombre de dents des trains d’engrenages. Pour ce faire, vous organisez la transmission sur deux, trois ou quatre arbres parallèles. Également, vous étudiez attentivement le graissage et la conception du carter protecteur. Dès lors, vous utilisez des clavettes coulissantes, des baladeurs ou le système Norton.
Réalisez les organes de manœuvre et les systèmes de verrouillage
Certes, vous commandez les baladeurs par une translation directe ou un levier oscillant. De surcroît, vous verrouillez automatiquement ou manuellement les positions sélectionnées dans le mécanisme. Parallèlement, vous repérez clairement les vitesses pour faciliter la conduite des machines industrielles. Finalement, vous adaptez ces mécanismes précis aux tours parallèles et aux perceuses à colonne.
Appliquez les mécanismes complexes : trains épicycloïdaux et variateurs
Justement, vous utilisez la relation de Willis pour analyser l’ensemble des trains épicycloïdaux. Par la suite, vous étudiez les boîtes Cotal-Maag et Wilson à présélection de rapports. En outre, vous réglez la vitesse en continu avec les variateurs P.I.V., Unicum ou Lisse. De cette manière, vous choisissez la solution idéale adaptée à chaque application.
Commandez le changement de marche et l’inversion de sens
Puis, vous inversez le sens de rotation par des courroies croisées ou des engrenages coniques. Rapidement, vous réalisez des retours rapides pour les opérations de chariotage et de fraisage. Aussitôt, vous combinez le changement de sens et la variation de vitesse. En conclusion, vous équipez les tours et les fraiseuses d’inverseurs de cuirasse performants.
Caractéristiques
-
Auteurs : Prudhomme, R. et Tourancheau, A. L.
-
Titre : Éléments de construction à l’usage de l’ingénieur – Tomes 3 et 4
-
Contenu : Organes de transmission du mouvement circulaire (arbres, paliers, supports de paliers, accouplements d’arbres, embrayages) et Transmission des mouvements circulaires (courroies, engrenages, frictions, boîtes de vitesses, variateurs)
-
Éditeur : Dunod
-
Dimensions : 15,6 x 24 x 2,3 cm
-
Nombre de pages : 161 + 166 pages
-
Dépôt légal : 1953 et 1948
-
Code : O00YM5WDKK / B004460B7I
-
Public : Ingénieurs mécaniciens, techniciens supérieurs, étudiants en construction mécanique
Par Prudhomme, R et Tourancheau, AL
Envoi soigné et Déposé en 48h (jours ouvrables) Edition Dunod 15,6 x 24 x 2,3 cm 161+166 pages depot légal:1953 et 1948 Bon Etat : Organes de transmission du mouvement circulaire (arbres, paliers, supports de paliers , accouplements d’Xarbres et embrayages.) et Transmission des mouvements circulaires (courroies, engrenages, frictions, boites de vitesses, variateurs)
Résumé
Une étude approfondie des engrenages cylindriques
D’abord, ce tome aborde en détail les engrenages à denture hélicoïdale. En effet, les auteurs établissent clairement l’intérêt de cette denture inclinée. De plus, les surfaces conjuguées forment des hélicoïdes développables précis. Ainsi, des relations mathématiques définissent les modules et les poussées. Précisément, vous calculez séparément les poussées axiale, radiale et tangentielle. Enfin, les techniciens taillent les roues avec des fraises ou des outils-pignons spécifiques.
Les engrenages coniques et leurs particularités géométriques
Pour commencer, les engrenages coniques transmettent le mouvement entre des axes concourants. Notamment, la roue plate joue un rôle fondamental dans leur conception. Également, la denture droite, hélicoïdale ou spirale offre des options variées. Alors, vous décomposez les actions de contact en trois composantes perpendiculaires. Par la suite, le calcul du module suit des règles adaptées à cette géométrie. C’est pourquoi la taille par génération utilise différents types de roues plates.
Les engrenages hyperboliques pour axes non concourants
Justement, ces engrenages dits gauches travaillent sur des axes non parallèles. On note que l’axe du mouvement hélicoïdal reste tangent aux deux cônes. Pour cette raison, les ingénieurs étudient soigneusement les surfaces primitives et conjuguées. Par exemple, le couple de la roue et de la vis sans fin constitue un cas fréquent. Dès lors, des applications numériques concrètes guident le dimensionnement. Parallèlement, vous calculez systématiquement les réactions sur les appuis.
Le choix raisonné des matériaux et des proportions
Certes, un inventaire complet présente les matériaux utilisables pour fabriquer les roues. En fait, la fonte mécanique et les aciers moulés dominent les applications courantes. À l’inverse, les aciers au nickel-chrome traitent les fortes sollicitations. De même, le bronze phosphoreux convient parfaitement aux vis sans fin. En outre, des normes strictes régissent les éléments proportionnels comme la jante et le moyeu. Par conséquent, l’ajusteur utilise des clavettes ou des cannelures pour la fixation sur l’arbre.
La conception des réducteurs et boîtes de vitesses
Désormais, les réducteurs de vitesse répondent à un besoin d’adaptation mécanique. Pour cela, le rapport global détermine le choix du nombre de dents. Puis, l’ouvrage discute la disposition sur deux, trois ou quatre arbres. De surcroît, le carter et le graissage assurent la longévité du mécanisme. D’un autre côté, les boîtes de vitesses emploient des clavettes coulissantes ou des baladeurs. Ainsi, le système Norton offre une progression géométrique des rapports.
Les organes de manœuvre et le verrouillage des positions
Pour leur part, les organes de commande des baladeurs exigent des mécanismes précis et robustes. Souvent, les constructeurs emploient la translation directe par tirette ou par vis. Également, ils utilisent largement le levier oscillant à point d’appui variable. Bientôt, le verrouillage automatique ou commandé maintient les positions bien stables. De cette façon, le repérage des vitesses guide l’utilisateur dans ses sélections. Finalement, ces éléments conditionnent l’ergonomie générale de la machine.
Les mécanismes complexes : trains épicycloïdaux et variateurs
Justement, la relation de Willis explique le principe du train épicycloïdal. En outre, la boîte Cotal-Maag et la boîte Wilson illustrent ce principe. Grâce à cela, la présélection des rapports anticipe les besoins du conducteur. Parallèlement, les variateurs de vitesse offrent une variation continue du rapport. Par exemple, le variateur P.I.V. utilise une chaîne spéciale à lamelles. De même, le variateur Lisse travaille par adhérence sur des cônes lisses.
Les changements de marche et les inversions de sens
Puis, le changement d’orientation ou de sens répond à des besoins différents. Rapidement, la courroie croisée permet une inversion simple et économique. De la même manière, les engrenages hélicoïdaux ou coniques assurent la même fonction. L’auteur détaille d’ailleurs l’inverseur de tour et le basculeur de fraiseuse. De plus, le retour rapide facilite les manœuvres en fin de course. En conclusion, chaque solution technique possède son domaine d’application privilégié.
Table des matières
AVANT-PROPOS…V
CHAPITRE PREMIER ARBRES
I. — Corps de l’arbre…1
A. Sollicitations…1
B. Construction…6
II. — Tourillons et pivots…9
A. Tourillons…9
B. Butées d’arbres et pivots…11
III. — Calcul des arbres…12
CHAPITRE II ORGANES D’APPUI ET DE GUIDAGE DES ARBRES
I. — Généralités…18
II. — Paliers horizontaux à charge radiale…23
A. Formes générales…23
B. Systèmes de graissage pour paliers…26
C. Étude des coussinets…29
D. Compensation d’usure dans les paliers…39
E. Paliers à patins oscillants…41
III. — Paliers verticaux à charge radiale…44
IV. — Paliers horizontaux à charge axiale…46
V. — Paliers verticaux à charge axiale…50
CHAPITRE III ORGANES D’APPUI ET DE GUIDAGE DES ARBRES
I. — Généralités…54
II. — Formes de roulements…58
A. Roulements à billes et à rouleaux pour charge radiale…58
B. Butées à billes et à rouleaux pour charge axiale…61
C. Roulements à rouleaux coniques pour charges mixtes…63
III. — Choix d’un roulement…65
IV. — Conditions de montage…73
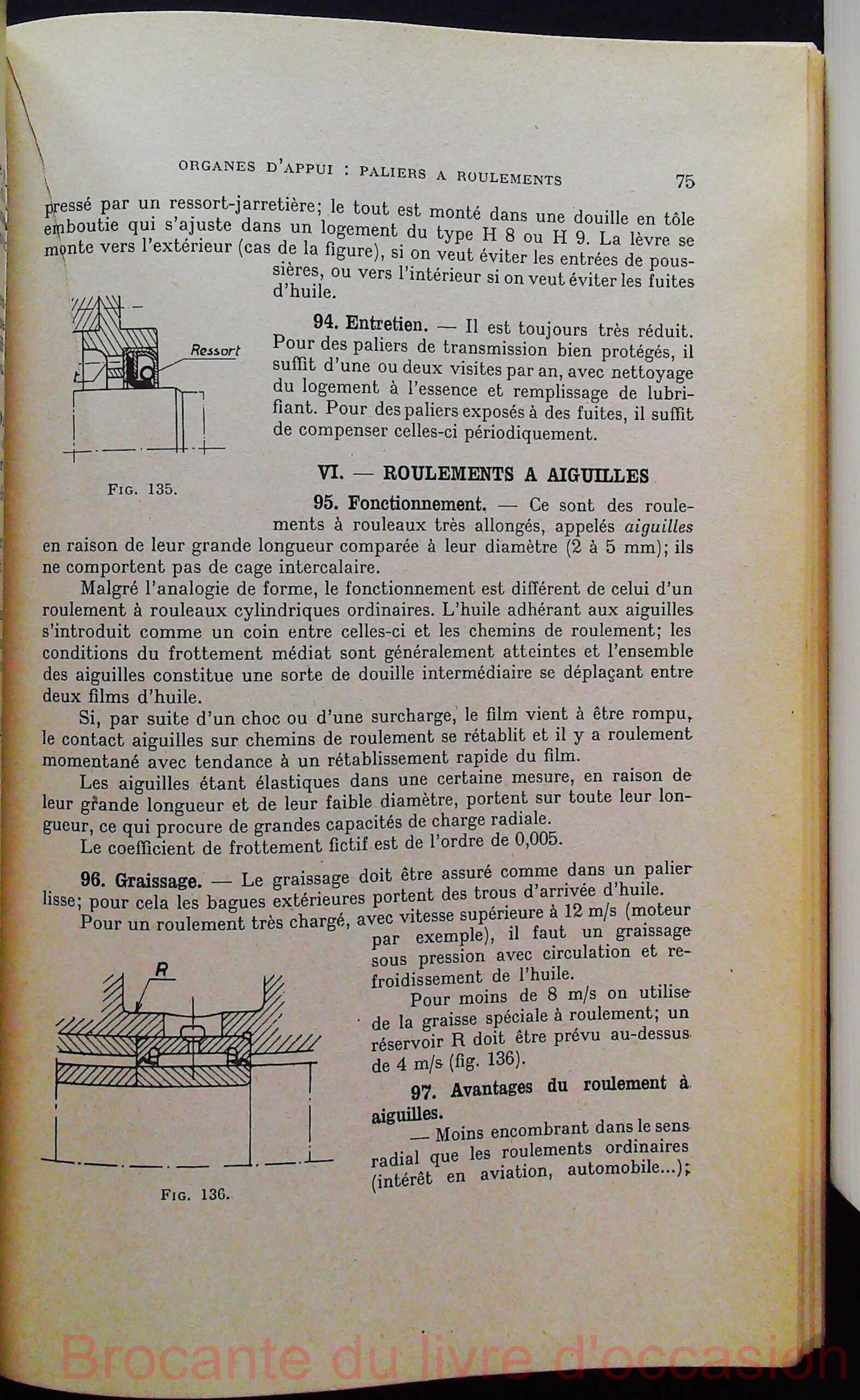
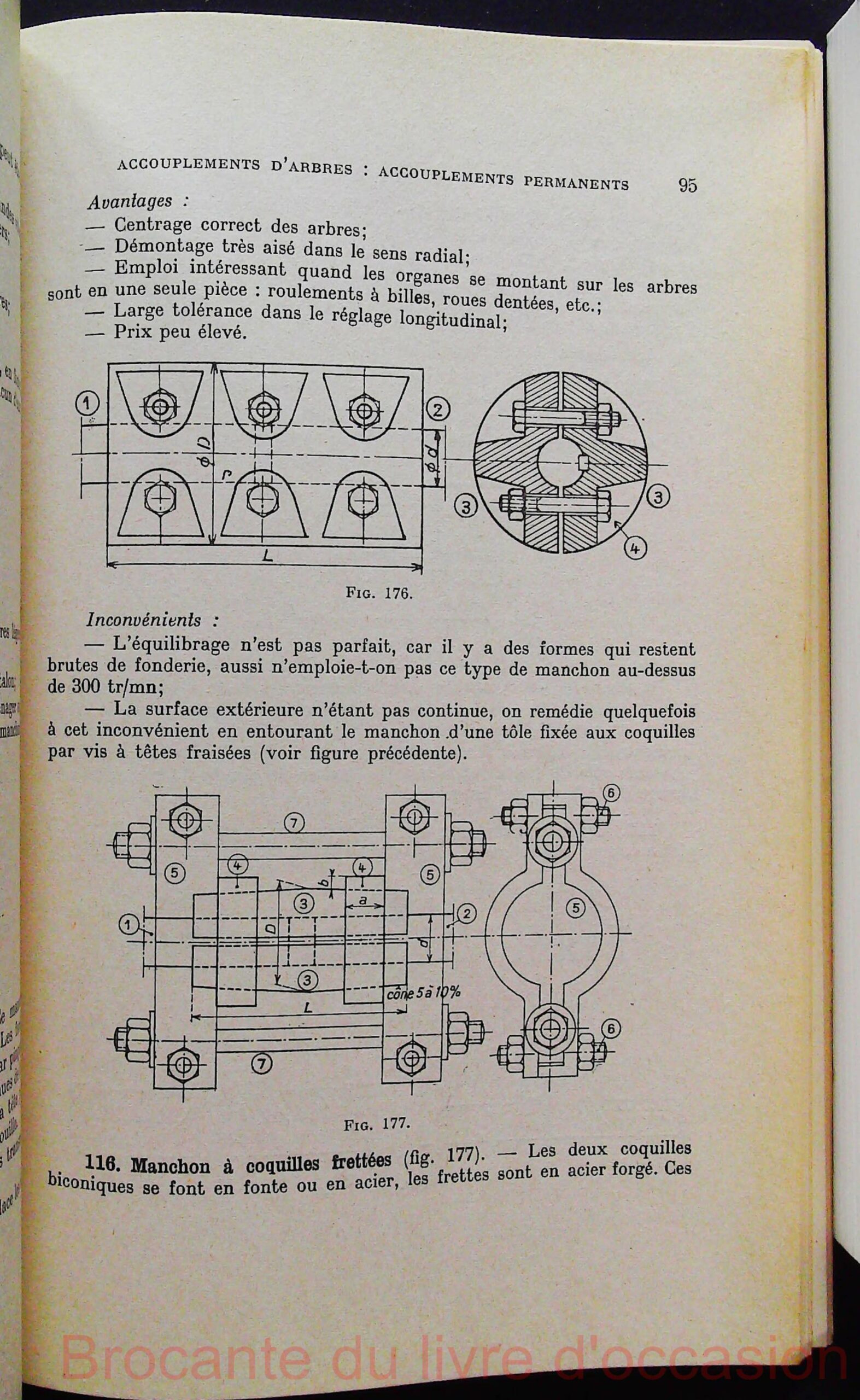
V. — Graissage, protection, entretien des roulements…75
CHAPITRE IV SUPPORTS DE PALIERS
Généralités…80
1° Supports pour paliers à patins…80
2° Supports paliers…85
3° Pendarts…87
4° Fixation des supports…88
CHAPITRE V ACCOUPLEMENTS D’ARBRES
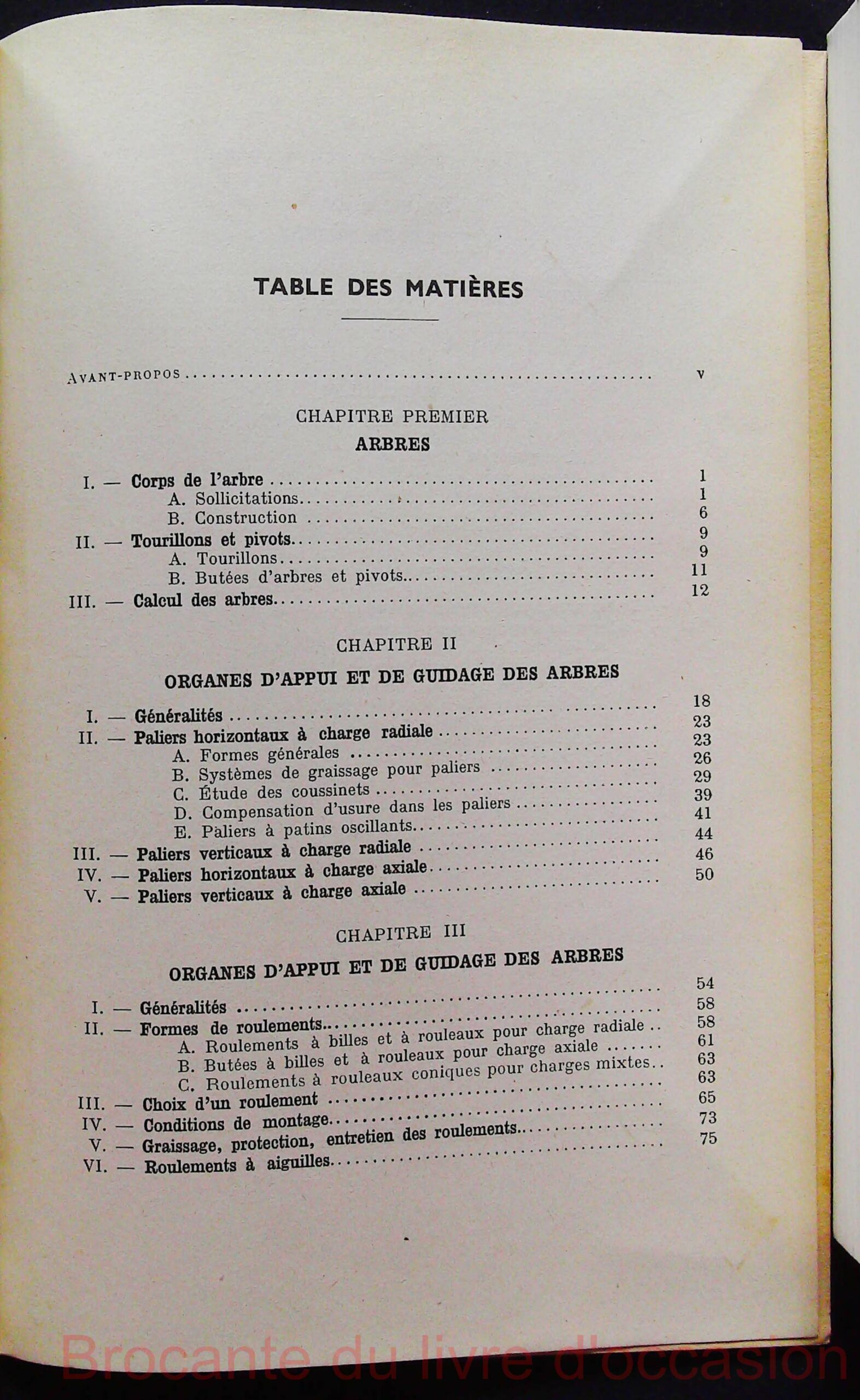
A. Accouplements fixes…92
B. Accouplements mobiles…98
C. Accouplements élastiques…108
CHAPITRE VI ACCOUPLEMENTS D’ARBRES (suite)
I. — Embrayages à entraînement instantané…115
II. — Embrayages à entraînement progressif…119
A. Généralités…119
B. Embrayages à friction plane…123
C. Embrayage à friction conique…130
D. Embrayage à friction cylindrique…137
E. Embrayages automatiques…141
F. Débrayage de sûreté…146
G. Embrayages spéciaux…148
Bibliographie…152
Annexe. Tableaux de roulements…153
Normes à consulter…162
IMPRIMERIE DE MONTLIGEON, LA CHAPELLE-MONTLIGEON (ORNE). — 46416-10-53.
Dépôt légal : 4ᵉ trimestre 1953. N° 2575. — Imprimeur N° 2055.
Table des matières
Avant-Propos…V
CHAPITRE I
ÉTUDE THÉORIQUE DE LA TRANSMISSION PAR LIEN FLEXIBLE
Principes…1
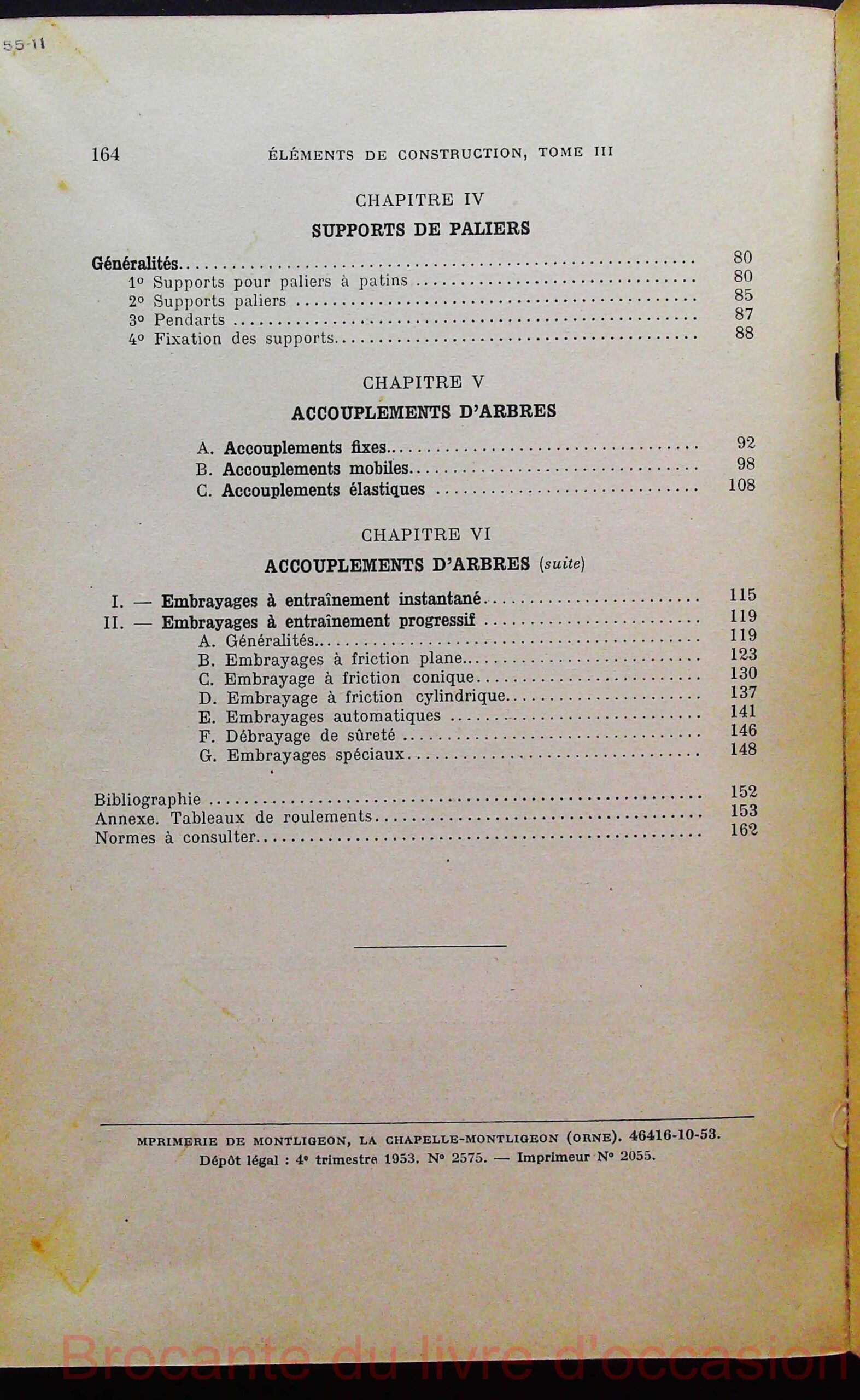
Relations entre les vitesses…1
Tension de pose T₀…1
Tension de pose et en marche…2
Efforts sur les paliers…3
Effort tangentiel et Puissance transmise à la jante…3
Action de la force centrifuge…3
Tensions nécessaires pour assurer la transmission d’une puissance donnée…4
Discussion…4
a) Augmenter V…4
Vitesse limite…4
b) Augmenter f…5
c) Augmenter α…5
Glissement fonctionnel des courroies…6
Longueur théorique d’un lien flexible (flèches nulles)…6
Contraintes du lien…7
Remarque…8
Nombre de passages par seconde en un point…8
Pression et surface de contact sur la jante…8
CHAPITRE II
ÉTUDE TECHNOLOGIQUE DES COURROIES
Classification des courroies…10
Matières des courroies…10
Cuir…10
Coton…11
Balata…11
Caoutchouc…11
Poil de chameau…11
Soie…11
Acier…11
Section des courroies…11
Courroies plates…11
CHAPITRE III
POULIES
A. — Construction des poulies…20
Constitution…20
Matériau…20
1Jante…20
a) Pour courroie plate…20
b) Pour courroie trapézoïdale…22
Moyeu…22
Brasure…23
2Cas particuliers…24
a) Poulies en bois…24
b) Poulies en deux pièces…24
c) Poulies en acier laminé…24
d) Tambour…24
e) Cônes étages…24
B. — Calculs relatifs aux poulies…25
1Calcul d’une poulie simple…25
a) Données…25
b) Inconnues…25
Diamètre minimum…25
Jante…26
Moyeu…26
Tension sur la jante…26
Fixation…26
Bras…26
Rapport de transmission…26
Distance d’axes…26
2Calcul de poulies étages…27
a) Données…27
b) Inconnues…27
c) Directives…27
Vitesse du renvoi…28
Diamètres extrêmes…28
Diamètres D₂ et Dₙ₋₁…28
Longueur de la courroie…28
Si les axes sont éloignés…29
Si les axes sont rapprochés…29
d) Cas de deux cônes différents…29
C. — Particularités de construction des poulies…30
1Poulie folle…30
a) Principe…30
b) Montage…30
c) Mécanisme…32
Galets de renvoi…32
2Enrouleur de courroie…33
a) Nécessité…34
b) Dispositifs…34
c) Avantages…34
d) Calcul…35
CHAPITRE IV
TRANSMISSION PAR CÂBLES
Généralités…37
Câbles…38
- Les câbles textiles…38
- Les câbles en coton…38
- Les câbles métalliques…38
- Jonctionnement…39
Calcul…39
Poulies pour câbles…39
Courroies doubles, triples…11
Courroie à cuir sur champ « Titan »…11
Courroies composites…12
La « Roko »…12
La « Nervus »…12
La « Pieuvre »…12
La « Panthère »…12
Courroie trapézoïdale…12
Courroie ronde…13
Jonctionnement…13
a) Collage…13
b) Agrafes…14
c) Coutures…15
d) Courroie « Titan »…15
e) Remarque…15
Pose des courroies…15
a) Tension de pose…15
- Par l’élasticité naturelle…15
- Par enrouleur fixe…15
- Par le poids de la courroie…15
b) Sens de rotation…16
Dispositions relatives des arbres…16
a) Deux arbres parallèles (courroie droite)…16
b) Deux arbres parallèles (courroie croisée)…17
c) Deux arbres non parallèles…17
Remarques…17
Conservation des courroies…18
a) Age…18
b) Milieu…18
c) Efforts…18
d) Graissage…18
e) Adhésifs…18
Calcul d’une courroie…18
a) Données…18
b) Inconnues…18
c) Directives…18
Calculs préalables…18
Calculs de vérification…19
d) Cas d’une courroie trapézoïdale…19
CHAPITRE V
TRANSMISSION PAR CHAÎNE
Principe…41
Chaîne Galle…42
Chaîne à rouleaux…42
Roues pour chaînes Galle et à rouleaux…43
a) Tracé…43
b) Métal…44
Chaîne silencieuse…44
Calcul d’une transmission par chaîne…45
Données…45
Inconnues…45
Directives…46
a) Efforts…46
b) Chaîne…46
c) Roues…46
d) Vérifications…46
e) Graissage…46
Chaînes calibrées…47
Généralités…47
a) Charges d’épreuve…48
b) Charges de rupture…48
c) Charges de travail…48
Roues…48
a) Roue (barbotin)…48
b) Roue (noix)…48
c) Tambours de treuils…48
Chaînes de manutention…49
Formes diverses…49
Modifications…50
Roues…51
CHAPITRE VI
ROUES DE FRICTION
Principe…53
Conditions de fonctionnement…53
Valeurs de f…53
Modification de la jante (roue Minotto)…54
Réalisation…55
a) Pignons cylindriques…55
b) Pignons coniques…55
Calcul…55
Données…55
Inconnues…55
Directives…55
a) Relations successives…55
b) Hypothèses de départ…56
c) Transformations successives…56
d) Vérifications…56
Utilisation…57
CHAPITRE VII
ENGRENAGES
Généralités…58
I. — Engrenages cylindriques à axes parallèles à denture droite…58
A. — Généralités…58
Définitions et propriétés…58
Cercles primitifs C, C₁…58
Profils conjugués…59
Dent; pas circonférentiel…60
1Terminologie normalisée relative aux dents…60
a) Module; diamétral pitch; relations…60
b) Rapport de transmission…61
2Méthodes générales d’obtention des profils conjugués…61
a) Méthode des enveloppes…61
b) Méthode des roulettes…61
B. — Engrenages à profils épicycloïdaux…62
Génération…62
Ligne d’engrènement ou ligne d’action…62
Roues d’assortiment…63
Pignon à très petit nombre de dents. Denture corrigée…63
Avantages et inconvénients des profils épicycloïdaux…64
C. — Engrenages à développantes de cercle…65
Profils conjugués à développantes…65
Ligne d’engrènement…66
Normalisation des engrenages à développante…66
Angle de pression…66
Proportions des dents, en fonction du module…66
Nombre de dents…66
Largeur de denture…66
Interférences de denture…67
Profil auxiliaire d’évidement; profil parasite…67
Correction de denture…68
Cas des engrenages intérieurs…68
D. — Calcul des engrenages cylindriques à denture droite…69
Calcul cinématique. Nombre de dents Z, Z₁…69
Calculs mécaniques. — Détermination du module m…70
Hypothèse…71
Vérification de la pression locale…71
Vérification à l’usure…71
Épaisseur à la racine des dents d’engrenages…71
a) Méthode graphique…72
b) Méthode algébrique…74
c) Valeurs numériques de a…74
Application numérique…75
E. — Construction des engrenages…75
Engrenages bruts…75
Taille au gabarit…75
Taille à la fraise…75
Taillage par génération…76
a) Outil-couteau sur machine Fellow…76
b) Outil-crémaillère (Machine Maag)…76
c) Vis-fraise…77
Dentures rectifiées…78
II. — Engrenages cylindriques à denture hélicoïdale…78
Intérêt…78
Surfaces conjuguées : hélicoïdes développables…78
Définitions et relations…79
Conduite…80
Nombre fictif de dents Z…81
Calculs spéciaux relatifs aux engrenages à denture hélicoïdale…82
a) Engrenages sans glissement…82
b) Poussées axiale, radiale, tangentielle…82
c) Calcul du module…83
d) Données pratiques…83
Taille des roues hélicoïdales…83
Fraises de forme…83
Outil-pignons Fellow…83
Outil-crémaillère…84
Vis-fraise…84
III. — Engrenages coniques…84
Rôle, définitions…84
Profils conjugués; roue plate…85
a) Denture droite…86
b) Denture hélicoïdale…86
c) Denture spirale…86
Calculs se rapportant aux engrenages coniques…86
a) Actions de contact…86
- Composante tangentielle…86
- Composante radiale…86
- Composante axiale…86
b) Calcul du module…87
Taille des engrenages coniques…87
Fraise de forme…87
Taille par génération…87
a) Roue plate à flanc plan…87
b) Roue plate dont le flanc a une directrice circulaire…87
c) Roue plate à flancs en développante…87
IV. — Engrenages hyperboliques, ou gauches…88
Axe du mouvement hélicoïdal tangent…88
Surfaces primitives…88
Surfaces conjuguées…89
Engrenages hélicoïdaux à axes rectangulaires…89
Actions de contact…90
Types de roues…91
Couple roue et vis…91
Relations…91
Usages…92
Application numérique…92
a) Données…92
b) Déterminer :
Cotes de fabrication du couple roue et vis…93
Actions de contact roue-vis…94
Réactions sur les appuis…95
Réactions sur les appuis de la roue. Remarque…96
V. — Éléments non cinématiques…97
Matériaux employés…97
Fonte mécanique…97
- Acier moulé…97
- Acier forgé au C…97
- Acier au Ni…97
4 bis) Acier au Cr…97
Acier au Ni-Cr…97
Bronze phosphoreux…97
Aluminium…97
Cuir vert…97
Céloron…98
Bois…98
Remarque…98
Éléments proportionnels…98
a) Éléments communs…98
b) Diamètres de tête et de pied…98
c) Jante…98
d) Moyeu…99
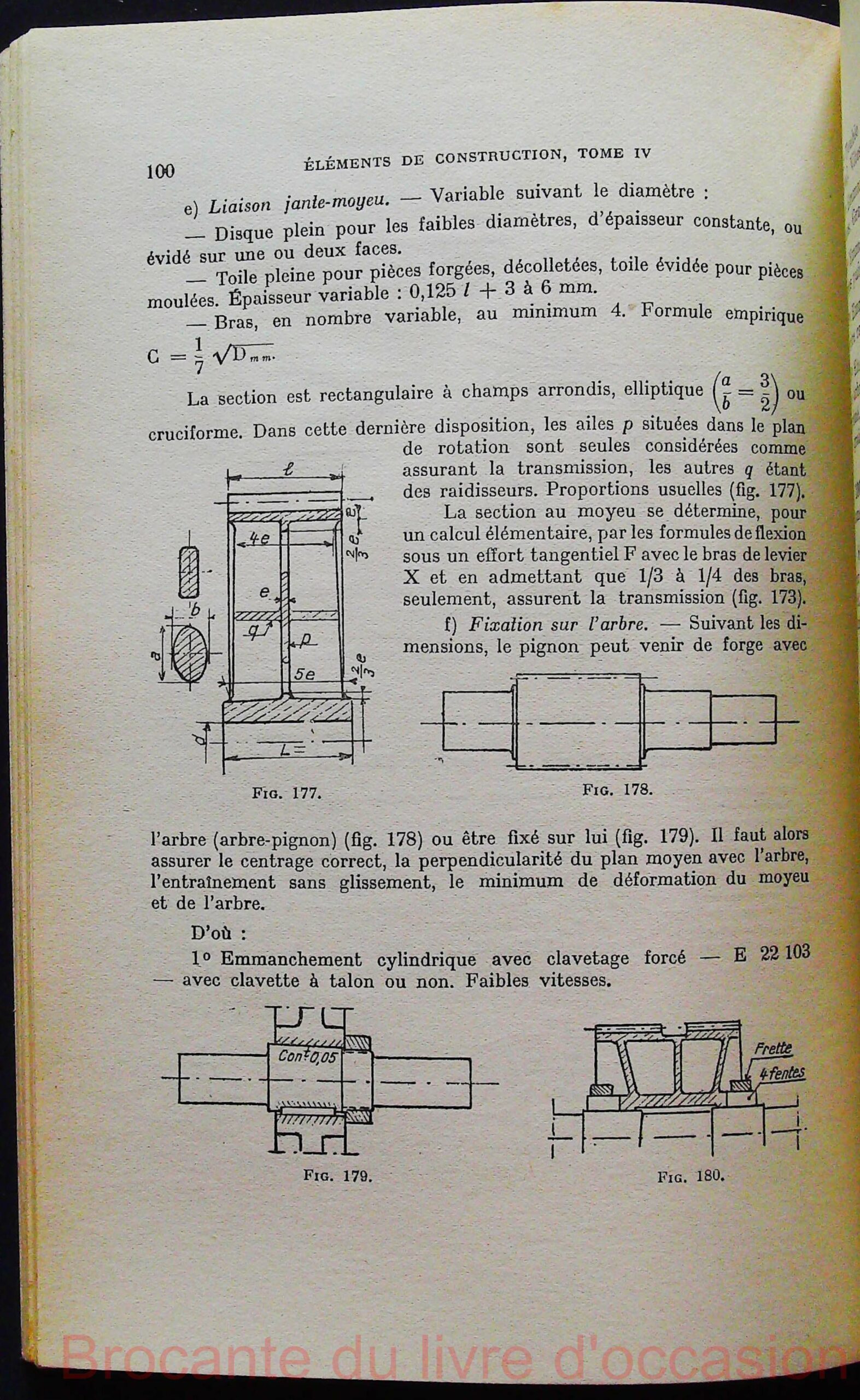
e) Liaison jante-moyeu…100
f) Fixation sur l’arbre…100
Constructions spéciales…101
Représentation en dessin…102
a) Roues cylindriques…102
b) Roues coniques…102
CHAPITRE VIII
RÉDUCTEURS DE VITESSES
Définitions…105
Conditions d’établissement…105
Données…105
Rapport global…105
Nombre de dents…106
Calculs…107
Dispositions générales…108
a) 2 arbres…108
b) 3 arbres…108
c) 4 arbres…108
Carter…111
Graissage…112
Réducteurs de turbines…113
Réducteurs à vis sans fin…113
CHAPITRE IX
BOITES DE VITESSE
Nécessité…115
Établissement…115
Données…115
Inconnues…115
Directives…115
A. — Dispositif…117
a) Clavette coulissante…117
b) Baladeurs…117
c) Roue intermédiaire (Norton)…117
d) Combinaisons des systèmes précédents…117
Clavette coulissante…117
a) Principe…117
b) Application : Boîte de chariotage…118
Baladeur à engrenages…118
a) Principe…118
b) Application…119
Baladeur à griffes…120
a) Principe…120
b) Réalisation…120
Système Norton…121
a) Principe…121
b) Réalisation…121
c) Variantes…121
Combinaisons diverses…122
Baladeurs à engrenages et griffes…122
Norton et baladeur…122
Deux baladeurs…123
Boîtes de vitesses pour automobiles…124
Synchronisme…126
B. — Organes de manœuvre…127
But…127
Conditions…127
a) Translation…127
b) Verrouillage…127
Réalisation de la translation…127
a) Translation directe…127
Tirette…127
Vis…128
Crémaillère et pignon…128
Contact avec le baladeur…129
b) Levier oscillant…129
- Point d’appui fixe…129
- Point d’appui mobile…129
- Point d’appui à rotule…130
Contact levier-baladeur…131
Verrouillage…131
a) Automatique…131
b) Commandé…132
c) Cas particuliers…132
Repérage des positions…134
CHAPITRE X
HARNAIS
Nécessité…135
Établissement d’un harnais simple…135
Données…135
Inconnues…135
Directives…135
- Application au tour parallèle…136
- Application à une perceuse à colonne…137
- Application d’un harnais double…137
Applications à un tour parallèle…137
Remarques…138
CHAPITRE XI
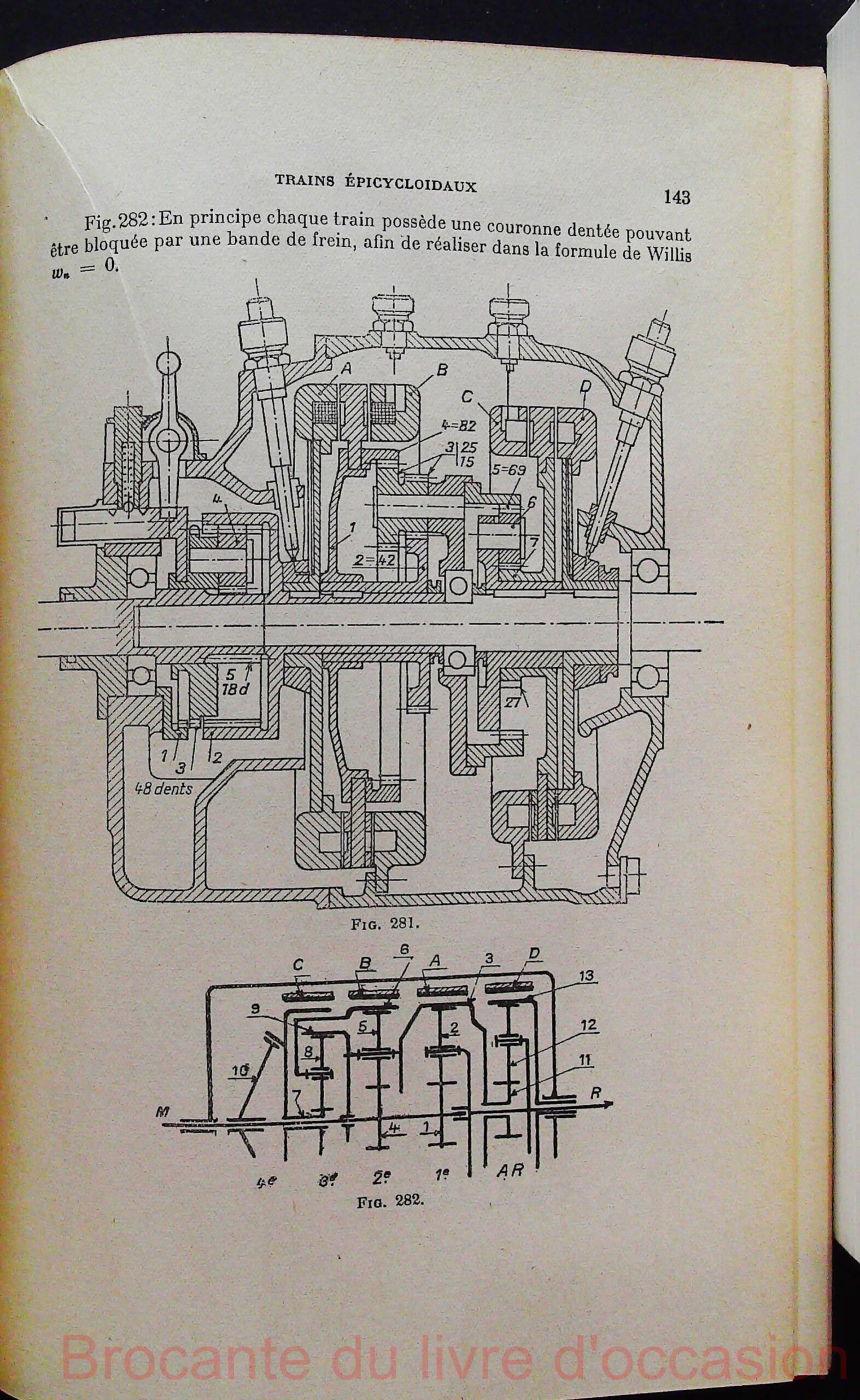
TRAINS ÉPICYCLOIDAUX
Principe…139
Relation de Willis…139
Autres exemples…141
Boîte Cotal-Maag…141
Boîte Wilson…142
Présélection…145
Train sphérique…146
Détails…146
Remarque…147
CHAPITRE XII
VARIATEURS
But…148
Principe…148
- Axes obliques…149
- Axes perpendiculaires…149
- Axes parallèles…149
Avec cônes égaux…150
Avec axes perpendiculaires…151
Variateur « Unicum »…151
Variateur « P. I. V. »…151
a) Principe…151
b) Détails…151
Variateur « Lisse »…153
a) Principe…155
b) Détails…155
c) Remarque…155
Variateur « PK » (Allemagne)…155
Détails…155
CHAPITRE XIII
CHANGEMENTS DE MARCHE
Buts…156
Classification…156
Changement d’orientation…156
a) Avec lien flexible (courroie)…156
b) Avec contact direct…156
Changement de sens…156
a) Avec lien flexible…156
b) Avec contact direct…156
Changement simultané de sens et grandeur…156
Courroie croisée…156
Courroie croisée et galets de renvoi…156
Engrenages hélicoïdaux…157
Par roues coniques…157
Par combinaisons de coniques et cylindriques…157
Changement de sens par courroies droite et croisée…158
a) Principe…158
b) Réalisation…158
Changement de sens par engrenages : Axes parallèles…158
a) Principe…159
b) Inverseur de tour…159
c) Réalisation par baladeur…160
d) Marche AR dans la boîte Cotal…161
e) Marche AR dans la boîte Wilson…161
Changement de sens par engrenages : Axes perpendiculaires…161
a) Principe…161
b) Application. — Inverseur de cuirasse de tour…162
c) Application. Arbres moteur et récepteur en prolongement…162
Bloquer les deux demi-boîtiers…162
Bloquer le tambour…162
Freiner le tambour par le carter…162
d) Basculeur de fraiseuse…162
Retour rapide…164
a) Nécessité…164
b) Principe…164
c) Réalisation avec courroies…164
d) Réalisation avec engrenages…164
e) Remarques…166
Bibliographie…167
Introduction tome 3
Contexte et objet du tome III : transmission du mouvement circulaire
GÉNÉRALITÉS SUR LES TRANSMISSIONS
Le tome III des « Éléments de Construction » à l’usage de l’Ingénieur, est consacré aux organes qui assurent la transmission du mouvement circulaire entre deux arbres sensiblement en prolongement.
Ce premier paragraphe établit clairement la finalité du volume : il traite spécifiquement des organes de transmission pour le cas particulier où deux arbres sont alignés (ou presque). L’expression « sensiblement en prolongement » précise la géométrie cible (ex. : arbres coaxiaux ou quasi-coaxiaux), distinguant ce tome des suivants (Tome V : transformation circulaire ↔ rectiligne ; Tome VI : organes pour fluides). Le ton est technique et didactique, typique d’un manuel d’école d’ingénieurs.
Typologie des transmissions et critères de choix
-
Types de transmissions. — On appelle transmission l’ensemble des organes qui permettent de transmettre mécaniquement l’énergie d’un moteur (électrique, à combustion interne, à vapeur…) à une machine réceptrice (machine-outil, pompe, compresseur…).
-
Plusieurs modes de transmission peuvent être envisagés. Si un seul moteur entraîne toutes les machines d’un atelier, la commande se fait par transmission générale ; si chaque machine réceptrice est entraînée par un moteur particulier la commande est dite individuelle ; enfin il existe une solution mixte : la commande par groupe, l’atelier possédant plusieurs moteurs, chacun d’eux assurant l’entraînement de plusieurs machines.
-
Le prix de revient de l’installation tenant compte, non seulement du prix d’achat, mais aussi des frais d’exploitation, doit être un des éléments déterminants pour le choix du mode de transmission.
L’analyse des principaux avantages et inconvénients montre le champ d’application convenable à chacun de ces systèmes.
Ce paragraphe définit rigoureusement le terme « transmission » et présente sa typologie fondamentale (générale, individuelle, mixte). Il introduit un critère économique crucial (coût global : achat + exploitation) comme facteur décisif dans le choix technique — une approche pragmatique et réaliste, cohérente avec la vocation professionnelle de l’ouvrage. La mention de l’« analyse des avantages et inconvénients » annonce la structure pédagogique qui suivra.
Avantages de la commande individuelle comparée à la transmission générale
-
Commande individuelle (Comparaison avec transmission générale).
Avantages :
— Solution nécessaire quand les machines travaillent à des vitesses très différentes les unes des autres et quand certaines d’entre elles doivent être arrêtées à l’exclusion des autres;
— Suppression des arbres de transmission au plafond et au-dessus des machines;
— Réglage plus facile de la vitesse du récepteur; pour les très grandes vitesses, cette solution est la seule à envisager (ventilateur, pompes centrifuges, machines-outils modernes à coupe rapide);
— Pertes par frottement et ventilation diminuées;
— Atelier plus propre et éclairage meilleur;
— Possibilité de donner aux machines des positions relatives différentes selon les nécessités des fabrications;
— Économie de force motrice quand certaines machines sont inutilisées;
— Utilisation aisée des ponts roulants au-dessus des machines.
Ce troisième paragraphe détaille, sous forme de liste structurée, les avantages techniques, économiques et ergonomiques de la commande individuelle. Chaque point est concis, opérationnel et justifié par des exemples concrets (ventilateurs, pompes centrifuges, ateliers modernes). La formulation « solution nécessaire », « seule à envisager », « économie de force motrice » souligne la pertinence pratique de ce choix dans l’industrie contemporaine (époque 1940–1950). L’accent mis sur l’hygiène, l’éclairage et les ponts roulants révèle une vision globale de l’organisation industrielle.
Introduction tome 4
Rappel du Tome III et extension au cas d’arbres éloignés ou rapprochés
Nous avons vu, dans le Tome III, comment on peut relier deux arbres en prolongement pour transmettre le mouvement circulaire de l’un à l’autre, en conservant la même vitesse de rotation.
>Dans le cas où les arbres moteur et récepteur sont éloignés l’un de l’autre, la transmission du mouvement circulaire nécessite de nouveaux organes. Il en est ainsi également, même si le moteur et le récepteur sont groupés en un seul ensemble, avec arbres rapprochés, quand la recherche d’un bon rendement des deux machines conduit à leur choisir des vitesses de régime différentes.
Ce premier paragraphe établit la continuité avec le tome précédent (Tome III : arbres en prolongement, même vitesse) et introduit la problématique nouvelle traitée dans ce volume : la transmission entre arbres éloignés ou rapprochés, notamment lorsque les vitesses de rotation doivent différer pour des raisons de rendement. La formulation « même si… quand la recherche d’un bon rendement… » met en avant la logique fonctionnelle et optimisante qui guide le choix des solutions techniques.
Nécessité d’organes spéciaux et cadre général d’étude
Des organes spéciaux seront encore nécessaires pour assurer la transmission, quand le récepteur doit fonctionner à des vitesses variables, susceptibles même de s’inverser pendant que le moteur conserve une vitesse de régime sensiblement constante.
>Nous sommes donc amenés à étudier les moyens de transmettre le mouvement circulaire continu entre deux arbres éloignés ou rapprochés, avec possibilité de modifier la vitesse de rotation en grandeur, sens et parfois même orientation ; on utilise pour cela :
Ce deuxième paragraphe précise les cas complexes exigeant des solutions avancées : vitesses variables, inversion de sens, changement d’orientation. Il annonce explicitement la structure analytique qui suivra (« on utilise pour cela : »), préparant le lecteur à la classification des organes de transmission selon leur fonctionnalité (vitesse, sens, orientation).
Trois grandes familles d’organes de transmission
a) Les liens flexibles, courroies, câbles et chaînes, avec leurs poulies ou roues spéciales; ces organes s’emploient pour transmission entre arbres éloignés, parallèles ou non, avec rapport de vitesses à peu près constant, dans le cas général, mais qui peut être rigoureusement constant avec des chaînes spéciales;
b) Les roues de friction, employées dans la transmission entre arbres rapprochés, parallèles ou non, avec rapport de vitesses à peu près constant (au glissement près);
c) Les engrenages employés dans la transmission entre deux arbres rapprochés, parallèles ou non, avec rapport de vitesse rigoureux.
Ce troisième paragraphe présente la classification fondamentale en trois catégories, basée sur le principe physique et les contraintes géométriques :
-
liens flexibles (courroies, câbles, chaînes) → pour distances importantes, rapport approximativement constant (sauf chaînes spéciales),
-
roues de friction → pour distances courtes, rapport approximatif (glissement inévitable),
-
engrenages → pour précision absolue (rapport rigoureux), surtout en proximité.
La distinction entre « à peu près constant » et « rigoureux » est cruciale : elle reflète la hiérarchie des exigences techniques (précision vs. simplicité/coût) et justifie le choix pédagogique de l’ouvrage.
Avis
Il n’y a pas encore d’avis.